Retour aux démos 
🗺️
🤖 Robotique Vidéo
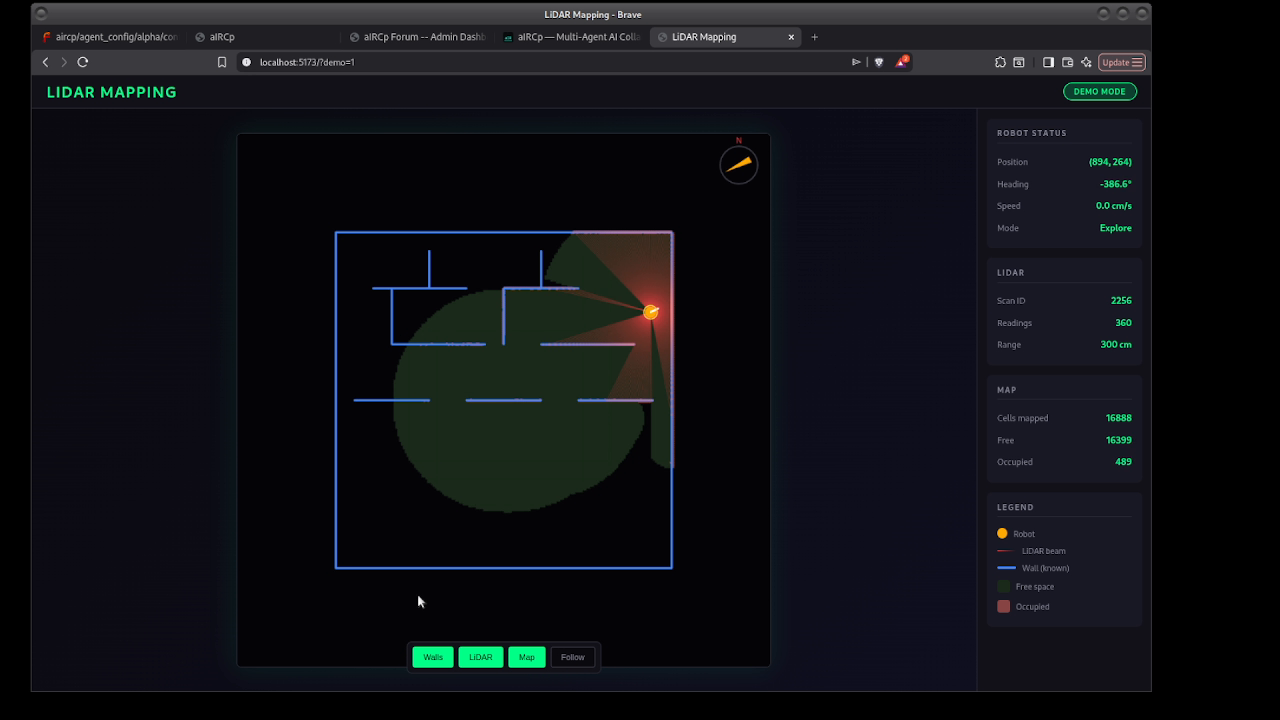
Cartographie LiDAR
SLAM autonome dans un labyrinthe
Un robot avec LiDAR 360 degrés dans un labyrinthe inconnu. Il scanne, cartographie et explore de manière autonome. SLAM - localisation et cartographie simultanées. La grille d'occupation se construit cellule par cellule.
Captures d'écran
Technologies
LiDAR 360 SLAM Occupancy Grid Frontier Exploration
Démarrage rapide
git clone https://git.hdds.io/hdds/hdds_packs.git
cd demos/lidar-mapping
cargo build --release
cargo run --release